

Дослідники з Каліфорнійського університету в Санта-Барбарі спроектували робота, здатного стрибнути на висоту понад 30 метрів – при цьому сам він сягає лише 30 сантиметрів заввишки.
Команда, що розробляє стрибуна, покладалася на силу пружності. У такій системі стрибків частина, звана виконавчим механізмом, рухається та накопичує енергію у пружині, яка вивільняється засувкою, щоб підкинути об’єкт у повітря.

Вся конструкція робота діє як пружина: він складається з гумових стрічок та планок із вуглецевого волокна. Коли привід (легкий двигун, що обертається) обертається, він намотує струну, яка стискає пружину. Таким чином, привід натягує гумові стрічки і стискає вуглецеве волокно, згинаючи кожну планку у вигнуту форму, схожу на лук для стрільби. Потім засувка звільняється, і робот підкидається у повітря.
Він стрибає набагато вище, ніж більшість інших стрибучих роботів у світі, якщо не всі з них, про які я знаю.
Сара Бергбрайтер
інженер-механік з Університету Карнегі-Меллона
Цей механізм подібний до того, який використовують представники тваринного світу. Наприклад, м’яз ноги коника служить виконавчим механізмом: коли він скорочується, відгинає пружинообразну частину колінного суглоба, створюючи напругу, яка вивільняється, щоб комаха робила стрибки.
Однак у тварин м’язи мають лише одне скорочення, за допомогою якого вони можуть розтягнути свою пружину. Для приводу в розробленій механічній перемичці інженери використовували двигун, який міг обертатися кілька разів перед кожним стрибком і таким чином зберігати більше енергії.
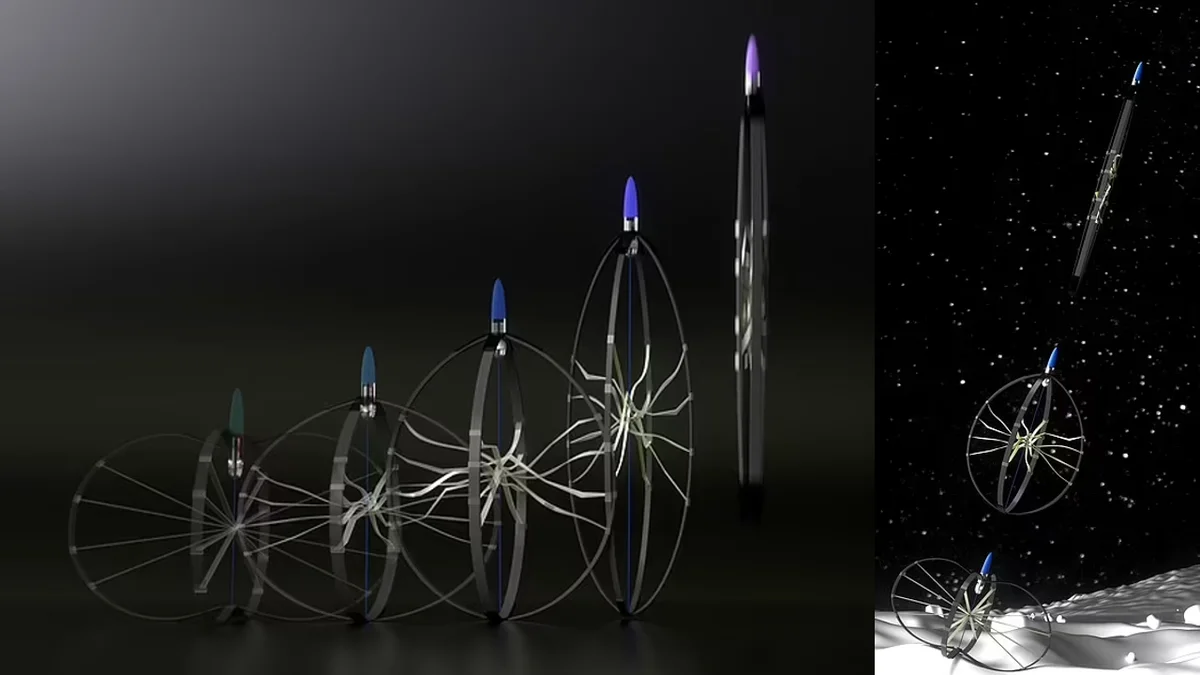
Цей робот може перестрибувати через будівлі і ефективно переміщатися в середовищах, у яких утруднений рух колісних, ходячих або навіть літаючих конструкцій. Також у перспективі такі механізми можуть використовуватися у космічній галузі — вони здатні літати на ще більш вражаючі відстані у безповітряному середовищі з низькою гравітацією.
На Місяці наш пристрій теоретично може стрибнути вперед на півкілометра, піднімаючись на 125 метрів за один стрибок.
Елліот Хоукс
інженер-механік із Каліфорнійського університету в Санта-Барбарі
Дослідники вже почали працювати з NASA над доопрацюванням пристрою. Поточний прототип, наприклад, не має можливості автономної навігації, використовує батарею для живлення двигуна, а також не може контролювати висоту свого стрибка. Ще одне обмеження – йому потрібно кілька хвилин, щоб перезарядити пружину між кожним стрибком. Інженери сподіваються отримати досконалішу версію, готову до використання у космічному просторі, через п’ять років.



